Die Funktion heißt "Scannerkalibration"; vielleicht nicht ganz unbegründet

Du musst dir klar machen, dass die Koordinaten, die du im PC_DIMMER eingibst, eins zu eins als Pan- und Tilt-Werte übernommen werden. Damit werden aber kartesische Koordinaten (Koordinaten auf der X-Y-Ebene) als Polarkoordinaten (Winkel mit Gerät als Mittelpunkt, Pan und Tilt) eingesetzt, ohne sie umzurechnen. Bei kleinen Winkeln (wie z.B. bei Scannern) geht das, bei MHs mit über 180° Fahrbereich wird es, wie du bemerkst, etwas schwieriger. Ich habe mal eine kleine Illustration gemacht:
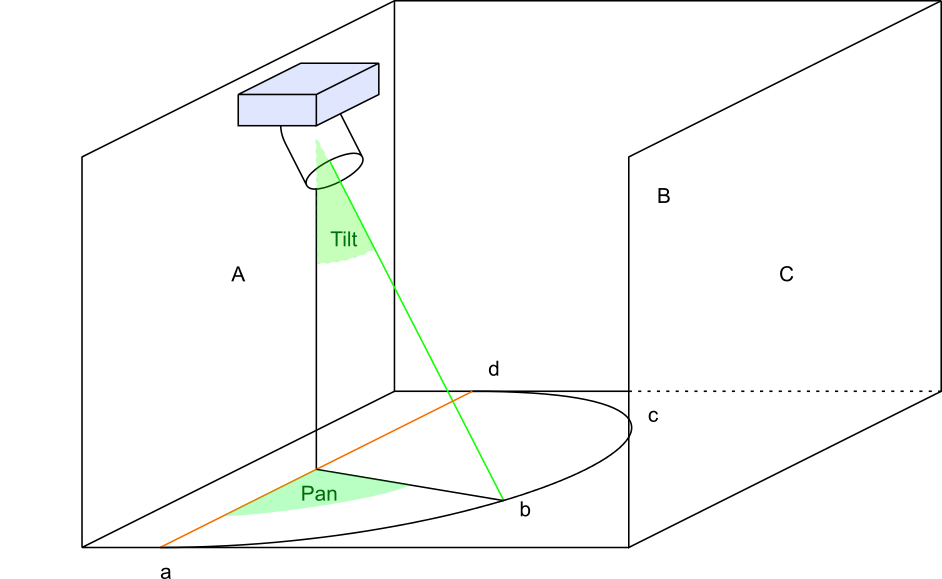
- visu.png (26.08 KiB) 29858 mal betrachtet
Wenn du hier Wand A herausnehmen willst, ist das noch recht einfach: Pan auf Bereich a-d begrenzen, Tilt von Boden bis Decke. Bei Wand B wird es schwieriger: Du könntest hier noch recht praktikabel Pan auf a-c begrenzen, dann geht dir halt ein Bereich vom Boden verloren. Du könntest es noch weiter annähern, indem du in der Kalibration ein Trapez zeichnest. Bei Wand C hast du jedoch nun ein Problem, da du mehr als vier Eckpunkte für die Kalibration bräuchtest: Im Pan-Bereich a-b bräuchtest du den vollen Tilt-Verfahrbereich, in b-c nur bis zur Wandunterkante (was in Polarkoordinaten eigentlich auch noch eine Kurve ist), und von c-d wieder vollen Verfahrbereich in Tilt.
Du siehst, es ist relativ kompliziert, die Bereiche im 3D-Raum auf die Polarkoordinaten des Heads abzubilden, wobei du dann bei komplizierten Räumen auch noch die 2D-Vorgabe aus Szenen und Co. sinnvoll auf das 3D-Modell abbilden musst. Wenn man den Gedankengang weitertreibt, müsste man das gesamte Programm 3D-fähig gestalten und ein Modell des Raums mit der Geräteanordnung abspeichern. Für ein paar Lichteffekte ist das aber dann vielleicht doch zu kompliziert. Damit musst du dich also arrangieren

Grüße,
Ingo


